Executing robotic movements within confined spaces has always been a challenge for innovation and technology teams. This includes narrow gaps and constricted spaces. However, a next generation robot with a high degree of freedom limbs does make the entire process look quite an approachable scenario.
Till this time, actuator limitations did make the process look impossible. As a resort, scientists decided to seek inspiration from mother nature. The primary examples are the animals like cockroaches and ants. These insects’ strategy is to compress their legs and body while moving through short spaces, modifying their width and height. Also, a similar movement style can be seen among the sandfish lizards who tuck in their legs, modifying the body width while moving across sand spaces. Also, other animals, like Octopuses, squeeze up their body to move through tiny spaces.
Scientists did detect this phenomenon as the process of morphological computation. And while progressing with robotic engineering, they went forward observing the movement of ants across tunnels. Here they found that the ants change their body postures depending on the area of movement. These particulars maintain a wide sprawl while moving through free spaces. But did shorten leg length when locomoting through confined environments. They drew their legs under the body while moving.
The next generation robot design
The scientists in the study used telescoping appendages similar to the leg length and sprawl among the ants. But with a certain stream of modification. The compliant appendages did make the robotic automation squeeze through tiny tunnels and low-level ceilings. The robot can compress its leg size as a quick response to environmental restrictions.
Physical Dimensions
The entire dimensions of the robotic platform stand at:
- Wight: 830 g
- Width: 31 cm
- Height: 7.75 cm
- Length: 20 cm
The dimensions of a single leg go as follows:
- Weight: 29.2 g
- Width: 8.8 cm
- Height: 5.5 cm
Leg geometry
- The robotic appendages feature a telescoping design, seeking inspiration from tube actuators (concentric).
- The design allows the leg to collapse within its frame without expanding into another dimension.
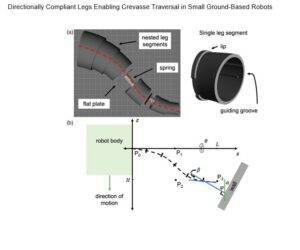
- Further, the developers have added internal springs between each leg segment, making it easy for the appendages to support the overall body weight of the robot with minimal compression.
- To maximize the scope of freestanding and minimize compression of spring, the robot’s internal springs were fitted in a horizontal direction. Which otherwise would have been problematic if fitted in vertical zones.
- The team did hypothesize about the presence of optimal leg stiffness, which is low enough to allow passive compression among narrow walls. But stable enough to support the robot’s weight, limiting inward collapsing.
- An open-source design tool helped with the unity part of the leg surface. A six-segment telescoping structure is shaped like a Bézier curve (cubic). Now, each leg did comprise cylindrical shapes of decreasing radius.
- Finally, the team adjusted the taper rate of leg segments, leg curvature, gap width in between leg segments, and wall thickness. A lip at the end of the cylinder did hold the entire leg assembly in position. And the springs did face internally in the cylinder’s body. They did get compressed with the legs telescoping into each other.
The process of Leg Fabrication
- A 3D printer helped with the printing of the segments and end caps of each leg in the robot. While printing, the team did come up with various customizable parameters to eliminate all possible chances of errors.
- The team did tune in the printing parameters to bring down the friction rate between pieces. This allowed the leg segments to telescope with ease into each other.
- The set parameters are – segment-wise taper angles, width gap between segments, and size & shape of the guiding grooves (internal).
- After printing, a gluing technology bonded the spring caps into each other’s ends.
- Now the legs underwent assembling in sequence, starting with a small segment.
Robotic Platform
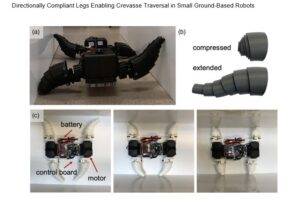
- The robotic platform comprises four individual telescoping appendages mounted into four specific top-torque servo motors.
- An Arbotix-M board did control the same, while a Li-Po battery on board helped with the power.
- Laser cut acrylic made flat plate did host the battery and the control board, also serving as the backbone of the robot.
- Further, this system did use an angular coupled gait with a continuous rotation diagonal.
The Next Generation Robot Demonstrations Explained

The team was able to make the robot pass through various natural habitats and confined environments. Here is a list of them all:
- The robot was able to get into a transitioning effect from a free walking space to entering into a narrow and angled setup, which is narrower than the total body width of the robot. It could easily move through the angled and parallel channels.
- A low roof space, at a level of 68% of the total robot’s body, was chosen for experiments. Now, the robot was able to compress and squeeze with a success rate of 100%.
- On testing the same over-step traversal, the system did perform well and reliably climbed over obstacles.
- Fourth on the list is the unstructured terrain, in which the robot was able to walk freely.
The telescoping structures made it possible to create dynamic stability over all types of unstructured terrains. However, the obstacle’s size did create quite a hindrance, with the robot not being able to climb over them.
Wrapping Up – The Next Generation Robot
The telescopic appendage mechanism did help the robot with modifications in its leg length in response to the natural environment. Finally, with all the alterations, the robot was able to enter narrow spaces and pass through them quickly. It was also able to cross through rough patches and tall steps.
The study does facilitate future research scope for scientists, where they can deploy the same to discover the unknown. The chosen place can be building rubbles and cave systems with confined space gaps. Also, the same technology does help researchers come up with portable robotic output that can help with information analysis. This robotic automation system can help the disaster response, rescue, and search teams find affected people and combat other anomalies.